
Jak tworzyć obszary pracy, strefy niedostępne i ścieżki transportowe w instalacjach bezprzewodowych EPOS

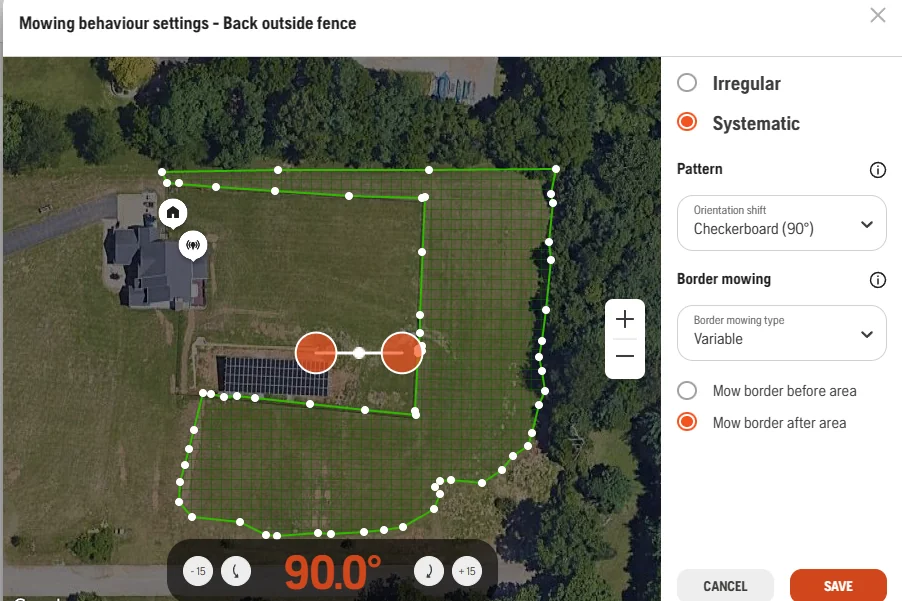
Jak utworzyć obszar pracy w aplikacji Automower Connect?
- Przejdź do sekcji mapy w aplikacji.
- Wybierz opcję Dodaj > Obszar pracy.
- Użyj aplikacji appDrive, aby zdalnie poprowadzić robota koszącego w prawo wokół trawnika.
Podczas jazdy robotem koszącym upuszczaj punkty w narożnikach lub na zakrętach trasy, aby utworzyć granice. - Naciśnij przycisk "Gotowe", aby połączyć ostatni punkt z pierwszym.
- Po utworzeniu granicy punkty można edytować w aplikacji w widoku mapy.
Uwaga! Po utworzeniu obszarów pracy nie można później podzielić ich na mniejsze. Można natomiast edytować poszczególne punkty odniesienia z dokładnością co do centymetra, jeśli konieczne jest dostosowanie granic.
Jeden obszar pracy
Wybierz tę opcję, jeśli chcesz mieć ten sam harmonogram, schemat koszenia i ustawienia dla całego trawnika. Nadal możesz tworzyć różne profile w jednym obszarze pracy, aby przełączać się między różnymi konfiguracjami.
Wiele obszarów pracy
Utwórz oddzielne obszary (na przykład: ogród z przodu, ogród z tyłu, basen), aby uzyskać maksymalną elastyczność. Każdy obszar pracy może mieć: indywidualne harmonogramy i ustawienia wysokości koszenia lub niezależne schematy koszenia. Dzięki temu można wysłać robota na określone obszary, podczas gdy inne pozostają niekoszone.
Informacje o profilach w instalacjach Automower
Profile — funkcja aplikacji Automower Connect umożliwiająca tworzenie różnych konfiguracji i ustawień, jak również zarządzanie nimi — w instalacjach Automower. Jest szczególnie przydatna w przypadku korzystania z jednego robota koszącego w wielu miejscach, a także gdy w ramach jednej instalacji istnieje potrzeba różnych ustawień.
Modele obsługujące profile w aplikacji Automower Connect
Profilami można zarządzać za pomocą aplikacji Automower Connect. Dotyczy to określonych modeli Automower, takich jak 308V, 312V, Automower 405X, 415X, 435X AWD i wszystkich modeli Husqvarna Automower serii Nera.
Profil koszenia zawiera szereg ustawień, takich jak konfiguracje kosiarki i obiekty mapy. Można utworzyć kilka profili dla jednej instalacji lub utworzyć różne instalacje — każdą z osobnym profilem.

Ile profili można utworzyć?
Aplikacja Automower Connect pozwala utworzyć do 10 profili.
Profile można utworzyć na dwa sposoby:
1. Kopiowanie bieżącej konfiguracji. Utwórz duplikat istniejącej instalacji. Twój nowy profil będzie wyglądał tak samo i w razie potrzeby możesz dostosować później ustawienia.
2. Pusty profil idealny do:
- Przełączania między EPOS przez chmurę Husqvarna, stacją referencyjną i fizycznym przewodem ograniczającym.
- Przenoszenia instalacji do nowego miejsca.
- Testowania całkowicie nowej instalacji.
Jak uzyskać dostęp do profili w aplikacji Automower Connect?
- Otwórz aplikację Automower Connect.
- Wybierz kolejno pozycje Więcej > Ustawienia > Zarządzaj profilami.
- W celu utworzenia nowego profilu kliknij symbol plus (+) w prawym górnym rogu. Możesz łatwo zmieniać profile odpowiednio do potrzeb.
Profile w instalacjach bezprzewodowych EPOS
W przypadku modeli Automower NERA wyposażonych w technologię EPOS profile można tworzyć zarówno dla instalacji bezprzewodowych EPOS, jak i dla konfiguracji fizycznego przewodu ograniczającego. Pozwala to przełączać się między instalacją wirtualną i fizyczną instalacją przewodową bez konieczności zmieniania za każdym razem ustawień.
Profile dla różnych lokalizacji
Bez względu na rodzaj posiadanej instalacji — fizycznej instalacji przewodowej lub instalacji bezprzewodowej — w każdym miejscu koszenia musi znajdować się stacja ładująca. W przypadku instalacji bezprzewodowych w każdym miejscu wymagana jest również lokalna stacja referencyjna RS1 lub RS5 lub EPOS przez chmurę Husqvarna.
W przypadku robotów Automower 308V i 312V lokalna stacja referencyjna musi zostać zainstalowana przez dilera Husqvarna.
Technologia EPOS przez chmurę Husqvarna jest w pełni dostępna w Polsce. Pozwala ona na bezprzewodową instalację kosiarek automatycznych Automower serii Nera z centymetrową precyzją bez konieczności montowania fizycznej stacji referencyjnej na posesji.
Strefy niedostępne utworzone za pomocą technologii EPOS
W przypadku instalacji bezprzewodowych EPOS możesz w dowolnym momencie utworzyć i zmodyfikować konfigurację trawnika bezpośrednio w aplikacji Automower Connect. Podpowiadamy jaki dodawać obszary pracy, tworzyć strefy niedostępne i konfigurować ścieżki transportowe z dokładnością co do centymetra.
Punkty, czasami nazywane również punktami odniesienia, to elementy, które rozstawia się w aplikacji, aby określić granice obszarów pracy, stref niedostępnych i ścieżek transportowych. Poniżej są ważne wskazówki dotyczące ich rozmieszczania:
- Minimalna odległość. Odległość między punktami nie może być mniejsza niż 0,3 m / 12 cali.
- Kąty narożników. Podczas ustawiania punktów nie wolno tworzyć ostrych narożników. Narożniki nie powinny mieć mniej niż 90 stopni.
- Liczba punktów dla całej instalacji jest ograniczona do 1000. Mniejsza liczba punktów ułatwia robotowi koszącemu obliczanie obszaru.
- Wybierając linię w obszarze pracy, możesz dodać nowy punkt. Punkty można usuwać lub regulować w aplikacji z dokładnością co do centymetra. Regulacja jest możliwa do 5 m jednocześnie w każdym kierunku. Pamiętaj, że aby edytować obszary, należy połączyć się z robotem przez Bluetooth.
- Podczas rozstawiania punktów skup się na miejscu, w którym znajduje się każdy punkt, a nie na sposobie, w jaki robot porusza się między nimi. Aplikacja łączy wszystkie punkty przy użyciu linii prostych, aby utworzyć granicę.
Jak stworzyć strefy niedostępne, aby robot nie wjeżdżał na określone obszary?
- Przejdź do sekcji mapy w aplikacji.
- Wybierz opcję Dodaj > Strefa niedostępna.
- Użyj aplikacji appDrive, aby poprowadzić robota w lewo i utworzyć strefę niedostępną.
- Naciśnij przycisk Gotowe, aby połączyć ostatni punkt z pierwszym.
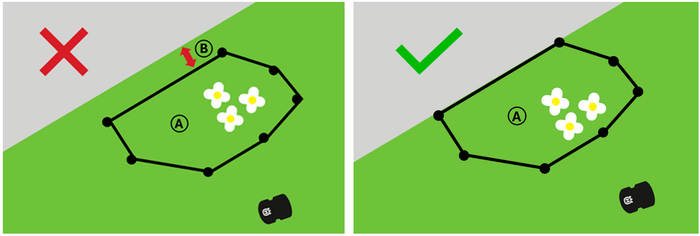
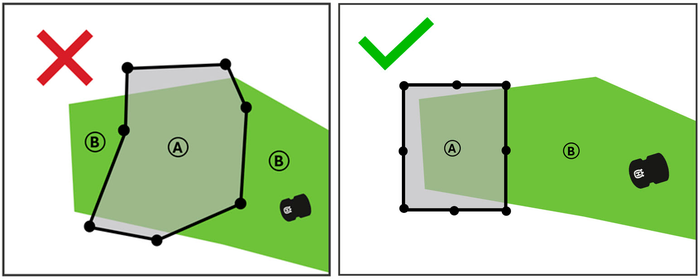
Podczas tworzenia stref niedostępnych unikaj konfiguracji blokujących dostęp lub tworzących miejsca, do których robot nie będzie mógł dotrzeć:
1. Unikaj wąskich przejść: podczas tworzenia stref niedostępnych (A) unikaj pozostawiania wąskich przejść (B), przez które robot koszący nie będzie w stanie przejechać.
2. Zapobiegaj blokowaniu obszarów: upewnij się, że strefy niedostępne (A) nie blokują części obszaru pracy (B), do których robot nie będzie miał dostępu.
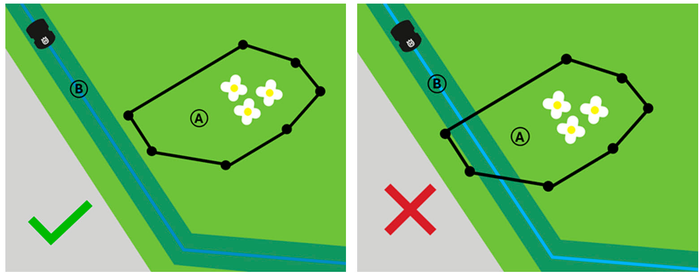
3. Nie blokuj ścieżek transportowych: utworzenie strefy niedostępnej na ścieżce transportowej uniemożliwi robotowi koszącemu dotarcie do celu.
Kiedy potrzebna jest ścieżka transportowa?
Ścieżka transportowa jest potrzebna, jeśli punkt dokowania stacji ładującej znajduje się poza obszarem pracy. Ścieżka transportowa prowadzi robota pomiędzy punktem dokowania a obszarem pracy.
- Punkt dokowania w obszarze pracy: ścieżka transportowa nie jest wymagana.
- Punkt dokowania poza obszarem pracy: ścieżka transportowa jest wymagana.
- Wiele obszarów pracy: każdy obszar, który nie obejmuje punktu dokowania, musi być połączony ze ścieżką transportową.
Kroki tworzenia ścieżki transportowej:
- Korzystając z aplikacji appDrive, przejedź robotem do obszaru pracy, który chcesz połączyć.
Jeśli chcesz połączyć kilka obszarów, rozpocznij od najbardziej odległego (patrząc od stacji ładującej). Do połączenia wszystkich obszarów potrzebna jest tylko jedna ścieżka transportowa. - Przejdź do sekcji mapy w aplikacji.
- Wybierz opcję Dodaj > Ścieżka transportowa.
- Upewnij się, że punkt początkowy ścieżki transportowej znajduje się co najmniej 1 m wewnątrz obszaru pracy.
Wskazówki dotyczące ścieżki transportowej
Na ścieżkach transportowych koszenie jest wstrzymywane. Robot nie kosi podczas jazdy po ścieżce transportowej.
Włączaj lub wyłączaj ścieżki transportowe. Ścieżki transportowe można tymczasowo włączyć lub wyłączyć w aplikacji Automower Connect.
Twórz możliwie najszersze ścieżki. Zwiększ szerokość ścieżki w aplikacji, tak aby zapewnić robotowi więcej miejsca i usprawnić poruszanie się.
Zapewnij, że ścieżki transportowe nie będą przebiegały przez strefy niedostępne. Poruszając się po ścieżce transportowej, robot ignoruje obszary pracy, ale nie przejeżdża przez strefy niedostępne.
Upewnij się, że żadna strefa niedostępna nie blokuje ścieżki transportowej robota.